



Enhance video understanding with Amazon Bedrock Data Automation and open-set object detection | Amazon Web Services
2025-09-11
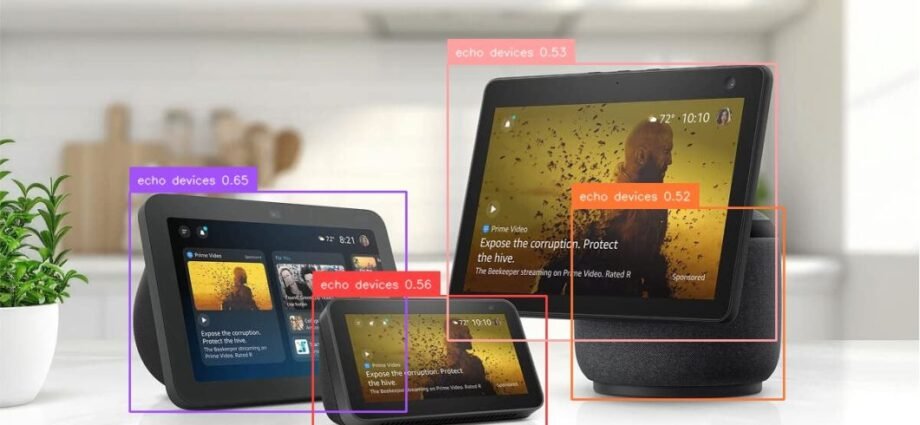
In real-world video and image analysis, businesses often face the challenge of detecting objects that weren’t part of a model’s original training set. This becomes especially difficult in dynamic environments where new, unknown, or user-defined objects frequently appear. For example, media publishers might want to track emerging brands or productsContinue Reading